
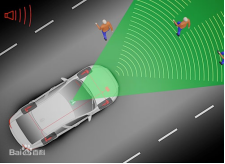
随着人工智能的发展,汽车自动驾驶不再是想象中的场景,你知道汽车是如何看清周围的环境,实现自主驾驶吗?这就不得不提到机器人的“眼睛”——三维成像激光雷达。激光雷达顾名思义,就是一种借助激光对物体距离进行测量的主动探测遥感设备,与微波雷达类似,人们最早是从蝙蝠身上找到的灵感。激光雷达与它们相比测距精度更高,并且可以看到物体更加细节的特征,因而在生活中有着非常广泛的应用。

蝙蝠和雷达,来源:百度百科 自动驾驶汽车 来源:百度百科
上世纪六七十年代,发达国家就已经开始了激光雷达在三维成像领域的研究。如果把激光雷达对物体的成像比作盲人摸象,那么我们可以把“摸象”的过程分成两步:首先是知道“象”的位置和距离,然后通过在“象”身上不断摸索来确定“象”的样子。而这也就对应着三维成像激光雷达工作的两大部分:激光距离测量过程和激光三维成像过程。
激光雷达的测距方法有哪些呢?
就像大家所熟知的那样,路程=速度×时间,激光雷达的测距过程也离不开这个公式。在空间中激光的飞行速度是已知的3×108 m/s。现有的激光雷达测距方法有很多种,除了直接测量激光脉冲飞行时间的方式,还可以通过对发射激光信号的幅度、频率等参数进行调制来间接的获取目标的距离信息。
利用激光雷达进行距离测量,针对不同的应用场景,我们要对症下药。
——————————————————
“激光测距里的千里眼”——脉冲激光测距法
脉冲激光具有峰值功率大的特点,这使它能够在空间中传播很长的距离,所以脉冲激光测距法可以对很远的目标进行测量。很远是有多远呢?目前人类历史上最远的激光测量距离是地球和月亮之间的距离,他们采用的就是脉冲激光测距法。自2019年6月以来,我国天琴计划团队已经多次成功实现地月距离的测量,通过对脉冲飞行时间的精确计时,得到地月距离在351,000 km到406,000 km(椭圆轨道)之间波动。

来源:http://tv.cctv.com/2019/12/20/VIDEtriMNEB1eYtFd41xjDin191220.shtml
脉冲激光测距是一种发展十分成熟的测距体制,它不仅可以用来对远目标探测,还可以用在数公里甚至数十米测量场景下。目前的汽车自动驾驶中也大多采用这种方法,其测距精度可以达到厘米量级,这对大部分的应用场景已经足够。

自动驾驶激光雷达,来源:百度百科
“明察秋毫”的相位激光测距法
对那些对测距精度要求较高的应用场景,如“空间交汇对接”中最后的接近段等,厘米级的测距精度已经不能满足它们的要求,这时候需要用相位激光测距的方法来测量。

空间交会对接,来源:百度百科
相位激光测距发射的是幅度经过了调制的连续激光信号,通过测量回波信号与发射信号之间的相位差来确定目标的距离。与脉冲激光测距相比,相位式激光测距法有更高的测距精度,其测距精度可以达到毫米级。但是由于相位式测距发射的激光为连续波,这使得它的平均功率远低于脉冲激光的峰值功率,因而它无法实现远距离目标的探测。一般我们生活中常用的手持式激光测距仪大多都是采用相位激光测距的方法。
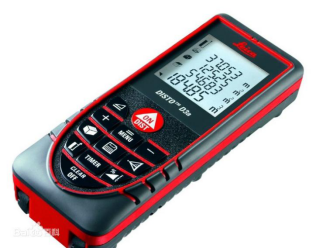
相位式激光测距仪,来源:百度百科
“追着你测”的调频连续波激光测距法
如果目标是运动的,除了距离我们还想知道目标的速度时,该怎么办呢?随着航天技术的发展,保证航天器能够安全的软着陆成为一个重要的问题。单次脉冲激光测距和相位测距法只能获得目标的距离信息,若要获得其速度至少需要两次测量结果并结合两次测量的时间间隔来计算。而这样计算出来的平均速度的精度远低于激光多普勒测速雷达的测速精度。
调频连续波激光测距方法可以解决这个问题,它不仅可以测距,还可以测速,因此可以应用于相对运动速度较高的目标测距。美国国家航天局NASA于2006年提出的用于重返月球和探测火星的自主着陆和障碍规避计划(ALHAT计划)正是采用了这种测距方法,该雷达于2008年和2010年进行了飞行试验,取得了不错的效果。

ALHAT计划,来源:https://zhuanlan.zhihu.com/p/29730661
激光雷达是如何成像的?
“盲人摸象”走完第一步,我们已经成功的找到了“大象”的位置和距离,下一步我们该如何知道“大象”的样子呢?这就是激光雷达的成像过程要解决的问题。简单的理解,激光雷达三维成像其实就是在测出目标各点距离的基础上,同时获得每个点与雷达之间的水平角和俯仰角,这样我们就得到目标三维信息了。按照目标各点三维信息的获取方式,激光成像体制主要有扫描式激光成像和面阵式激光成像。
“让激光动起来”的扫描三维成像
扫描式激光成像方法目前已经相当成熟,在地形测量、工程建设,汽车导航领域有着非常广泛的应用。它由单点激光测距配合快速光束扫描器件来实现对目标上各点距离信息的获取,再将这些距离信息与该点对应光束指向的方位角和俯仰角结合得到目标的距离-角度-角度图像(Rang-Angle-Angle),又称为三维图像。
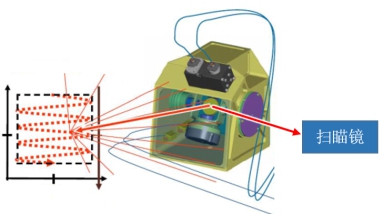
扫描式激光三维成像
美国国家航天局NASA为测量冰盖质量平衡、冰盖高度和海冰厚度以及陆地地形和植被特征等研制了ICESat星载激光雷达成像系统。ICESat于2003年1月13日发射成功, 它在激光测距的基础上,利用卫星平台的运动,实现对地表的单点扫描成像。在轨工作7年后,ICESat于2010年完成了对地球表面绝大部分地区的激光测绘工作。

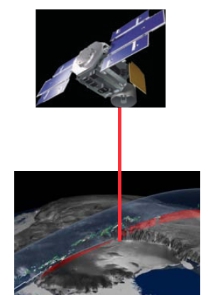
ICESat激光单点扫描成像
扫描三维成像也被广泛的用在汽车自动驾驶里。为了提高扫描的速率,市面上的车载激光雷达往往采用发射激光阵列的形式进行扫描成像,这也被称为多线束成像。其中Velodyne公司以360°旋转的多线束激光雷达为主要产品,扫描线数达到了16线、32线及64线,是机械旋转加多线扫描成像的典型代表,技术较为成熟。

Velodyne多线扫描成像激光雷达,来源:http://www.elecfans.com/d/779002.html
“一眼就能看穿你”的面阵三维成像
除了这种扫描遍历目标的成像方式,有没有其他更加便捷,“啪”的一下就能得到目标三维信息的成像方式呢?有!面阵式激光成像就是为此产生的一种快速成像方式。相比于扫描式激光成像需要逐点扫描测距的方式,面阵式激光成像它仅需发射一次激光脉冲即可以得到一整幅三维图像。如果把扫描成像的方式比作用手指摸索目标全貌,那么面阵成像就像是用巨大的手掌直接覆盖目标。同时,因为没有扫描结构,所以面阵式系统整机结构更加紧凑,体积更小。按照探测器的不同,面阵三维成像大致可以分为:APD阵列和CCD相机两种探测方式。
APD阵列的每个像元都是一个单点激光测距的单元,它能够直接给出与其对应的距离信息。上世纪90年代后期,美国麻省理工学院林肯实验室(MIT/LL)用盖格模式下的雪崩光电二极管焦平面阵列(GM-APD FPAs)作为面阵三维成像激光雷达的探测器,其阵列的规模日益增大,从4×4、8×8到128×32乃至256×256。2003年MIT/LL对地面目标进行了机载三维成像试验和机载植被穿透实验,实验表明采用焦平面探测器的面阵式三维成像激光雷达可以快速获取目标三维图像,有效地识别林中隐蔽的坦克。
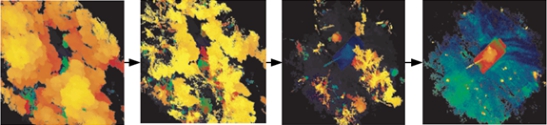
基于APD阵列的三维成像激光雷达对密林中隐蔽坦克进行探测
2018年,中国科学院光电技术研究所提出了基于偏振调制的激光三维成像方法,利用EMCCD相机作为探测器,提高了系统的探测灵敏度。同时,利用偏振调制技术从EMCCD拍摄图像的灰度信息得到脉冲飞行的时间,从而实现距离的测量。该系统仅需发射一次脉冲即可获得一幅三维图像,因而可以用于高速运动平台或高动态目标的三维成像。
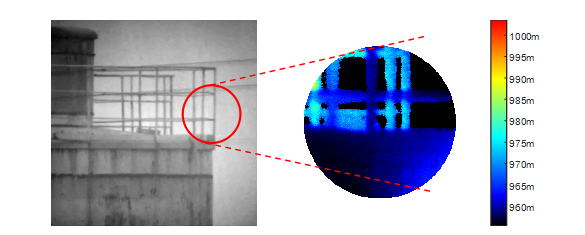
(a) 灰度图像 (b) 距离图像
中科院光电所研制的偏振三维成像
面阵三维成像虽然成像速度快,不需要扫描结构,但是它将系统接收的回波功率平均分布到每个探测像元上,探测像元越多,分散到每个像元上的回波功率
就越低,因此面阵成像系统的测距范围远小于单点扫描测距系统,一般仅适用于较近距离的成像探测。
激光雷达三维成像系统与传统的被动相机相比不仅可以获得目标的强度信息还有更加丰富的距离信息;与微波雷达成像系统相比又具有全天时、测量精度高和分辨率高的特点,因而在现代成像领域发挥着越来越重要的作用。随着现代科技和社会的发展,相信三维成像激光雷达在未来会有更大的应用前景!
微信

