随着科技的日益发展特别是尖端科技的发展,大运动范围的跟踪(粗跟踪)应用也从静平台发展到了动平台上,这就要求粗跟踪设备向着小型化、智能化的趋势发展并且要求跟踪设备精度高且功耗低。由于齿轮传动有着功耗低且体积小等优点,越来越多的设计者倾向于寻求齿轮附加电机的设计。因此,在现代伺服系统中,常采用低功率直流电动机与齿轮箱相结合以获得高转矩。然而,齿轮传动控制不可避免地也给系统带来了一些新的问题,如齿隙和非线性摩擦,这些非线性扰动会严重影响系统跟踪精度。
中国科学院光电技术研究所光束控制重点实验室亓波课题组提出一种基于传感器融合的不依赖模型的扰动观测器(DOB)控制方法,实现对非线性扰动抑制,提高了控制系统闭环性能。该方法利用电机端编码器为电机转速测量反馈元件测得电机转速和负载端编码器为负载转速测量元件测得负载转速,再利用所测得的速率偏差来实施这种DOB的干扰,与位置信号相比,负载和电机之间的速率偏差可以快速的显示出行星齿轮系统中存在的扰动以提高齿轮驱动控制系统的位置控制的闭环性能。而由于电机速度闭环的高带宽,则不需要该装置的逆模型。因此,这种DOB控制方法不需要对系统进行复杂的建模。相比于传统控制方法,跟踪精度有很大的提高。
相关研究成果发表在国际重要期刊《sensors》上,论文链接:http://www.mdpi.com/1424-8220/18/3/754
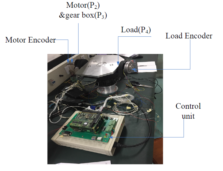
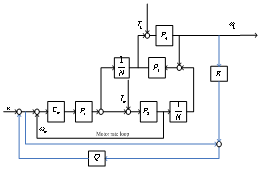
图1 基于传感器融合的不依赖模型的扰动观测器控制(Mode-Free DOB)
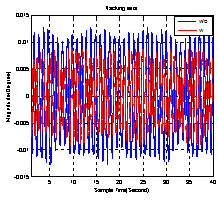
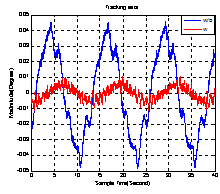
图2 基于传感器融合的不依赖模型的扰动观测器(DOB)控制方法和传统控制方法位置跟踪误差比较


