空间激光通信、自适应光学、太空望远镜系统等前沿光学系统对光轴的稳定性要求极高,并且由于应用需求的大范围拓展,其逐渐被安装在诸如飞机、舰艇、航天器等运动载体上。运动平台上基座的扰动会直接传递到光路中,从而降低偏转光束的稳定控制精度,极大地破坏系统性能。特别是对于星地间光通信系统,其针尖对麦芒的对准精度需求,要求极大地隔离卫星摄动对光路的干扰。光学稳定控制系统由于其惯量小、带宽高,可有效隔离基座中高频扰动,实现光轴的高精度对准,是一种非常有效的措施。但传统的控制方法所能实现的光轴惯性稳定控制精度有限,无法满足更高要求的稳定控制。
中国科学院光电技术研究所光束控制重点实验室任戈、毛耀课题组在运动平台光轴精密稳定控制方法研究上取得进展。该团队以实际工程问题为切入点,从控制结构简化、多数据融合与复合模式控制三个方面着手,分别提出一种基于插件式加速度反馈控制方法、一种基于加速度计的虚拟速度环融合稳定控制方法和一种结合多闭环的加速度扰动观测复合控制方法,有力地增强了系统的主动扰动隔离能力,提高了稳定控制性能。相比于传统控制方法,光轴稳定控制精度提高数倍。该系列研究成果陆续发表在近期的Optical Engineering(doi: 10.1117/1.OE.56.8.084105.)、Optical Engineering(doi: 10.1117/1.OE.56.8.085101.)和Sensors(doi: 10.3390/s17112648)期刊上,并同时申请一系列相关控制算法专利。
该研究得到了国家自然科学基金委、科技部、中科院等项目的支持。
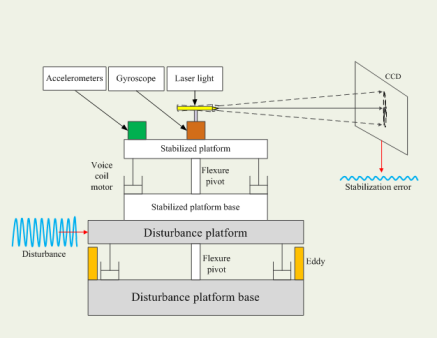
系统结构示意


